A disaster with my Digitrax Zephyr Express meant I had to ship it to the factory in December for repairs with no firm return date. 😬
What should I do? Build a DCC-EX Command Station? I had the parts1. This had been my intent all along. But at the time, I lacked confidence, punted, and bought the Digitrax. An opportunity to correct a mistake?
The command station is built around an ESP32 WROOM Arduino UNO compatible board with built-in WiFi
I followed DCC-EX's instructions. They're thorough. And include workarounds to the bugs on the Espduino board. Everything came together as intended. Then I uploaded the software using EX-Installer.2 Easy-peasy.
The motor driver shield with 2x 1-1.5 A channels to drive main and programming tracks. Workarounds are visible from pins bent out from the side and jumper wires in the headers.
The combination of the 2 boards is smaller than my mouse. The cables are the power and track connections.
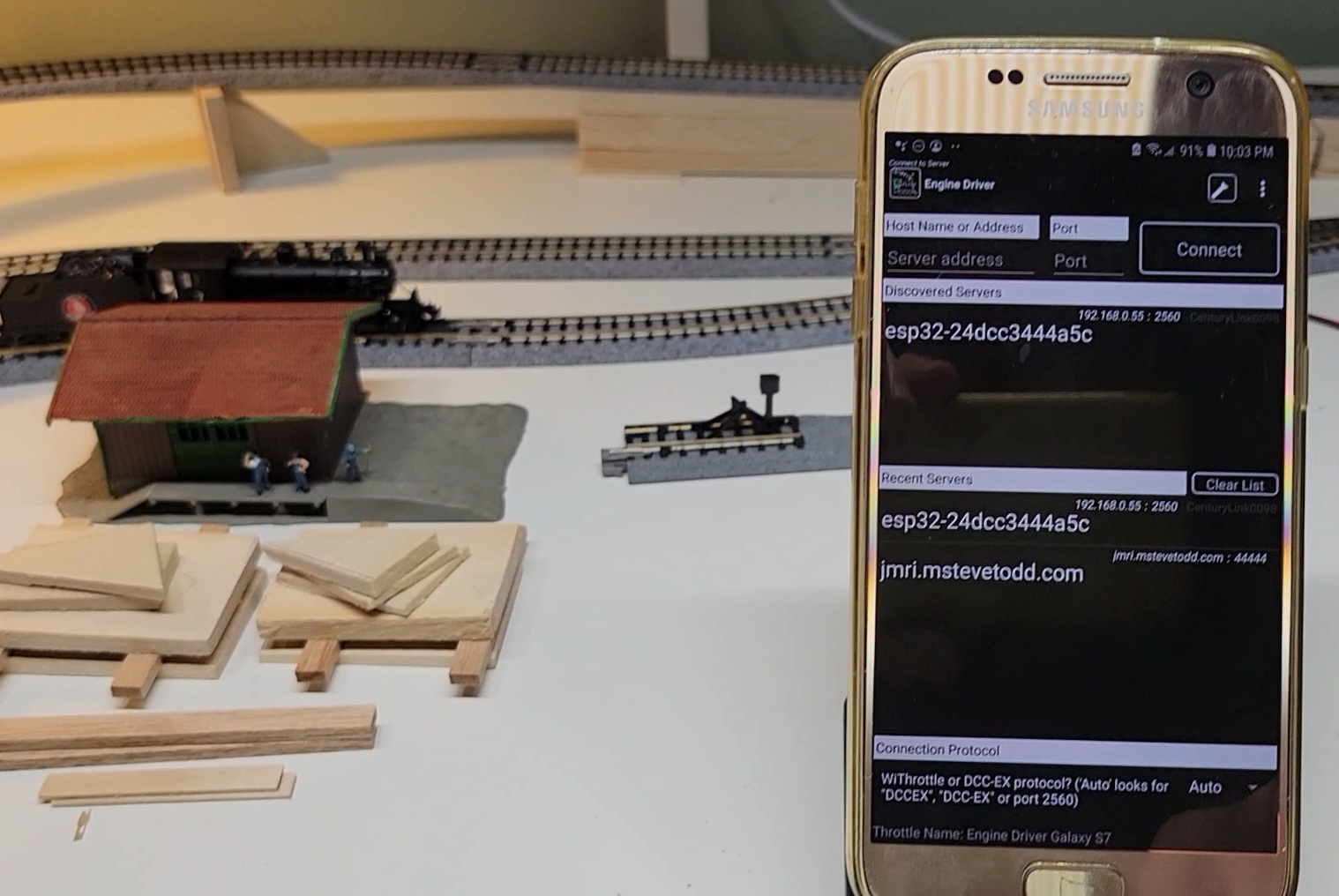
Once the command station was assembled, I fired up Engine Driver3, a mobile phone app, to serve as throttle and user interface. And before you could say Casey Jones, I was wirelessly running trains and switching turnouts with a repurposed 2015 cellphone! Cool!!!
Engine Driver fired up on my 10 year old Samsung.
The main throttle page showing my two locos selected from the DCC-EX loco roster.
Another cool thing about the DCC-EX Command Station is its EXRAIL train automation scripting. It's built-in and straightforward. The video below shows a first attempt. Train automation is one of my model train Holy Grails. So I guess there is a silver lining to bricking the Digitrax. Thanks for reading.
Everything about building the command station - board recommendations, DCC-EX software, documentation, its functionality and capability, the throttle software, etc. - worked like a champ. Thank you DCC-EX and Engine Driver teams for really excellent products!
Details
Automation. Great Northern #7 is dispatched. It's pulling a Great Northern red caboose. It makes a bit more than a circuit, huffing, whistling, and belling, afterwhich New York Central #1906 sets off in pursuit, hauling some cut lumber. After a few circuits, NYC #1906 catches its prey and retires. GN #7 carries on for another lap finishing roughly adjacent to its companion. There are no sensors (yet). The two locos were crudely speed characterized with the automation script relying on that data for timing.
Layout. Kato Unitrack. One double crossover and two power routing #6 turnouts switched by a track signaled and powered Digitrax DS74.
Throttle. Engine Driver connected via home internet and the WiThrottle server built into the DCC-EX Command Station. It controls the locos, the turnouts, and initiating routes and automation.
Trains. Both locos are Bachmann ALCO 2-6-0's made circa 2013 and are supposed to represent prototypes from roughly1898 and 1923. NYC #1906 is NOS with a simple 2 function (speed and headlamp) DCC factory decoder installed. GN #7 was purchased used and the previous owner installed an aftermarket ESU LokSound 5 Sound and DCC decoder. Both rolling stock are used MicroTrains cars.
To my coaches, Megan, Ellen and Lilly. Subject: Strength Friday v Speed Sunday I thought the recent Friday and Sunday workouts would be interesting to compare. I think I've got a couple findings. While there's more to be gained from a closer look, here's what I've got so far. To recap, Friday's otw strength workout was 3 x 5 x 1 minute on, 1 minute off, @ 18, 20, 22, MAX pressure. Sunday's otw speed workout was 3 x 6 x 1 minute on, 1 minute off, @ 30, 32, 34, open, MAX speed. For the record, both were hard. I met expectations at a B-B+ level. Friday we lost a rep to wakes in the Cut; finished one shy before returning to the dock on time; and I was over the the prescribed rates 2-3 beats. Sunday lost 2 reps to turns and was generally over 30, but not much variation. Findings. I don't gain as much speed as I should at higher rates. I don't row as well at rate. I think this is related to not hingi...
Hi Steve, Thanks for reaching out. I have quite a few docs and albums I can share with you, which I'll do below. And I'll send a few pics annotated with names to faces. But I don't have time at the moment to write an "article" that might be more suitable for the newsletter. But let's start with what I have and see where that gets us. The Class of '75 Stanford Crew Reunion, Seattle, May 2025 This is the third "event" where some number of Stanford Crew alums from the mid 70's have convened in Seattle. I moved to Seattle in 1990. By 2011 I was ready to dip my toe back in the water and I've been rowing at Pocock in Seattle ever since. The rowing in Seattle is excellent. And Pocock is a good place to host alumni events. The first of these alumni events commemorated a teammate who had died from cancer, Mark Grosenbaugh, '75. Mark, Sam Francis, '75, Dick Bailey, '76, and I, '75, spent the summer of '75 trying out for the US...





Comments
Post a Comment